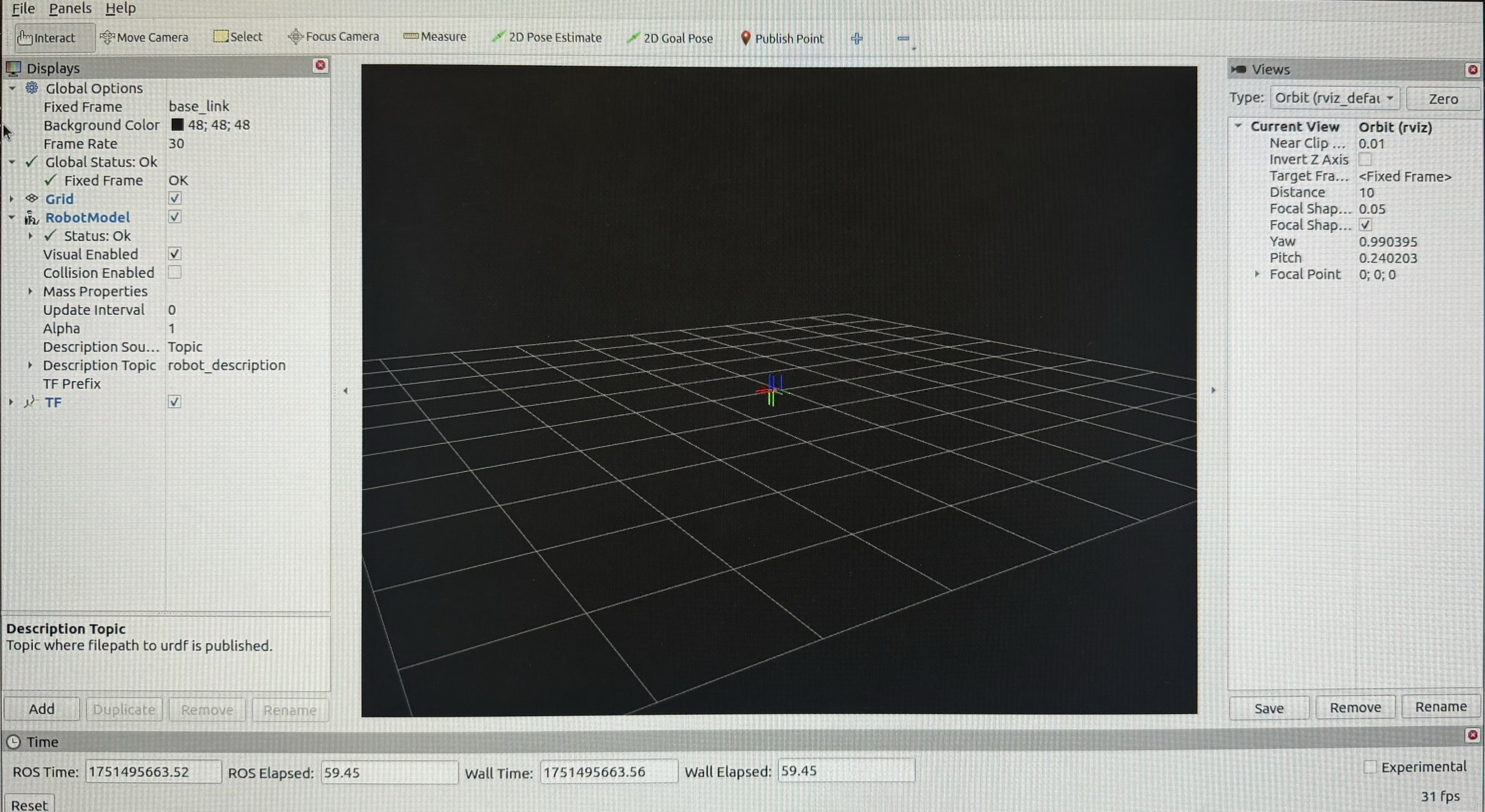
Hello! I followed this tutorial: RViz Basics - Stretch Documentation. I am using ROS2 Humble, and I am trying to visualize in RViz. In RViz, there are no errors but the Robot Model is not showing.
Hi @sahitha, this is interesting. Are you running this on the robot, or is this on a separate machine connecting to the robot? Would you post the output in the terminal as well?
I’m running on a separate machine connecting to the robot. I’ve tried re-installing and recalibrating the urdf file, checked for network issues, QoS issues, and checked the topics. The /robot_description topic is publishing only 150 B instead of the full URDF, I suspect that could be the issue.
Here are the terminal outputs:
hcrlab@popo:~$ ros2 run rviz2 rviz2
[INFO] [1751580324.110575223] [rviz2]: Stereo is NOT SUPPORTED
[INFO] [1751580324.110637013] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[INFO] [1751580324.267582250] [rviz2]: Stereo is NOT SUPPORTED
hello-robot@rocky:~$ ros2 launch stretch_core stretch_driver.launch.py
[INFO] [launch]: All log files can be found below /home/hello-robot/.ros/log/2025-07-03-15-05-52-287132-rocky-4342
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [stretch_driver-3]: process started with pid [4348]
[INFO] [joint_state_publisher-1]: process started with pid [4344]
[INFO] [robot_state_publisher-2]: process started with pid [4346]
[stretch_driver-3] /usr/lib/python3/dist-packages/scipy/__init__.py:146: UserWarning: A NumPy version >=1.17.3 and <1.25.0 is required for this version of SciPy (detected version 1.26.4
[stretch_driver-3] warnings.warn(f"A NumPy version >={np_minversion} and <{np_maxversion}"
[stretch_driver-3] [INFO] [1751580353.946635056] [stretch_driver]: For use with S T R E T C H (TM) RESEARCH EDITION from Hello Robot Inc.
[stretch_driver-3] [INFO] [1751580353.946915183] [stretch_driver]: stretch_driver started
[stretch_driver-3] Key mapped to End-Of-Arm Tool: eoa_wrist_dw3_tool_sg3
[stretch_driver-3] [INFO] [1751580355.679954901] [stretch_driver]: Changed to mode = position
[stretch_driver-3] [INFO] [1751580355.680865612] [stretch_driver]: broadcast_odom_tf = False
[stretch_driver-3] [INFO] [1751580355.705083287] [stretch_driver]: rate = 30.0 Hz
[stretch_driver-3] [INFO] [1751580355.707919334] [stretch_driver]: twist timeout = 0.5 s
[stretch_driver-3] [INFO] [1751580355.709191551] [stretch_driver]: base_frame_id = base_link
[stretch_driver-3] [INFO] [1751580355.709451856] [stretch_driver]: odom_frame_id = odom
You might try cloning and building Stretch Description in your workstation. After cloning, you’ll need to copy your batch’s mesh/xacros to the meshes and urdf folders, and compile them using xacro:
ros2 run xacro xacro `ros2 pkg prefix stretch_description`/urdf/stretch_description.xacro > `ros2 pkg prefix stretch_description`/urdf/stretch.urdf
You can confirm the it visualizes in Rviz using ros2 launch stretch_description display.launch.py. This might help Rviz know where to fetch the mesh files when you’re connected to the robot. Although, I’m not sure if this is the issue, since normally, Rviz will report errors when its unable to find mesh files it needs.
We followed the steps listed but it seems like we’re facing the same issue. Thank you for the guidance though.
1 Like
Thanks, please reach out to Hello Robot’s support email to set up a call with an engineer.
1 Like