Sometimes, after running robot code, the arm does not retract completely — it stops about 3–4 cm short of fully stowing. Even after running stretch_robot_home, the arm does not always go all the way in. This causes timeouts in my scripts.
When I try manually pushing the arm in, it moves smoothly at first but becomes noticeably stiff in the last few centimeters, requiring extra force. This makes me think the issue may be mechanical rather than software.
Has anyone experienced this kind of partial retraction?
Is there a recommended procedure to check or service the arm mechanism (e.g., cleaning, lubrication, partial disassembly)?
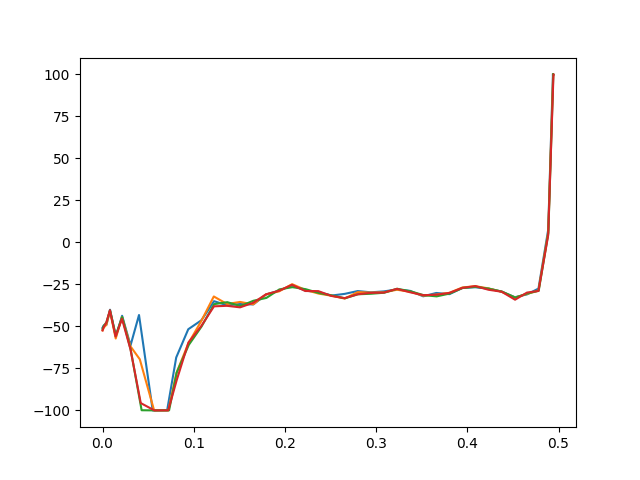
I ran the REx_calibrate_guarded_contact.py CLI as suggested (screenshots attached). The calibration completed but printed warnings that the contact thresholds are pegged at the limits:
Warning: Contact threshold of -90.000000 near minimum of -90.000000.
There may be a mechanical issue with the joint. Contact Hello Robot support.
Warning: Contact threshold of 90.000000 near maximum of 90.000000.
There may be a mechanical issue with the joint. Contact Hello Robot support.
Thanks @seongwoncho, you’re right, the arm mechanism is at the upper limit of what the arm motor can safely handle. Would you reach out to support@hello-robot.com so we can coordinate the repair?