
I am continuously getting this error if I am running any autonomous demo given in the hello-robot demo and mapping.launch file. I can’t use my camera and depths sensor at this point. Please help
Hey @sitaneja, would you post attach a log of the output from running roslaunch stretch_funmap mapping.launch?
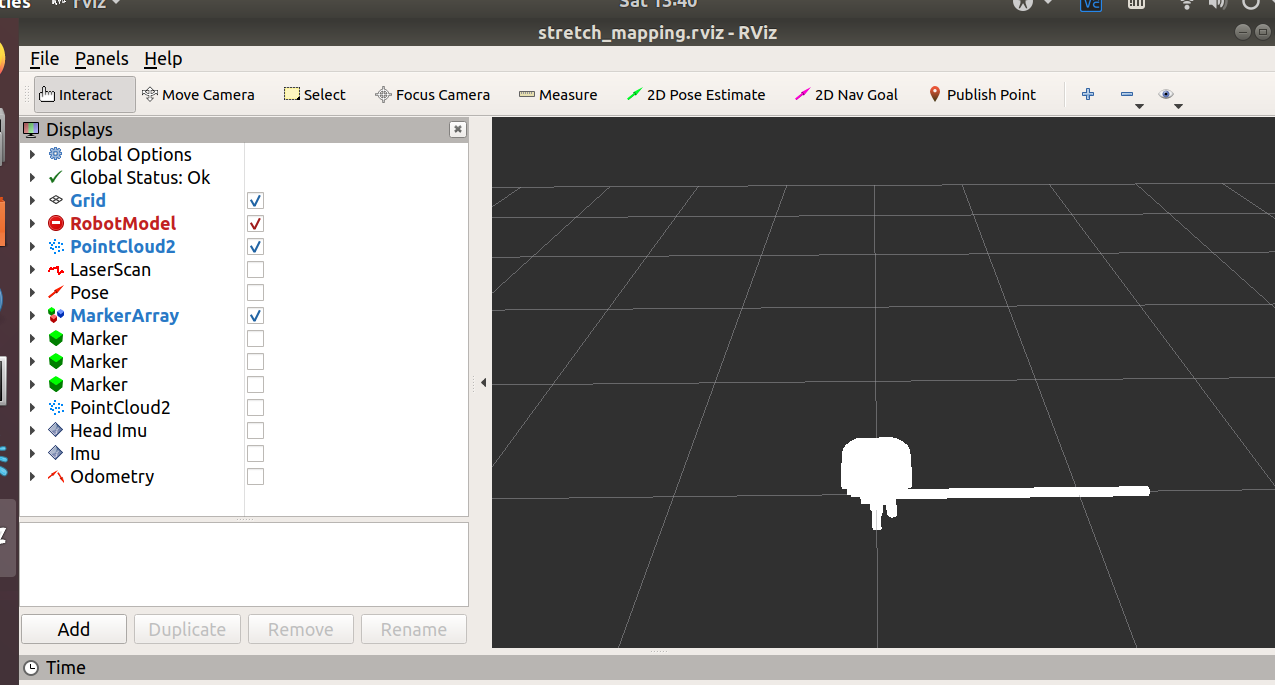
You can safely ignore the warnings you’re seeing in the first screenshot, they’re completely innocuous and should disappear in the next release. The white silhouette of Stretch in Rviz indicates something isn’t coming up correctly, but I’ll need the log to help you debug this.
WARNING: Package name "ROAM" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
WARNING: Package name "ROAM" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
WARNING: Package name "ROAM" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
e[33m[ WARN] [1596317308.895578687]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.e[0m
[ERROR] [1596317310.181874]: /stretch_driver action server must be in navigation mode to receive a twist on cmd_vel. Current mode = None.
e[33m[ WARN] [1596317323.992066672]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_filter] rosconsole logger to DEBUG for more information.e[0m
e[33m[ WARN] [1596317384.002037964]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_filter] rosconsole logger to DEBUG for more information.e[0m
virtual GMapping::GridSlamProcessor::~GridSlamProcessor(): Start
virtual GMapping::GridSlamProcessor::~GridSlamProcessor(): Deleting tree
e[31m[stretch_driver-4] escalating to SIGTERMe[0m
e[31m[stretch_driver-4] escalating to SIGKILLe[0m
e[31mShutdown errors:
* process[stretch_driver-4, pid 15409]: required SIGKILL. May still be running.e[0mI have added the logs. At this point, I guess camera or depth sensor is not working. Please help with solution. I have made the robot totally wireless as you suggested so that it can rotate and capture the environment.
Hi all, resolved the issue offline. The RealSense Camera Manager node was dying like @sitaneja had mentioned. We’re releasing the log and the solution for others whose realsense2_camera_manager node crashes in a similar way. Here’s a log he was receiving from running the launch file for just the RealSense camera (using roslaunch stretch_core d435i_high_resolution.launch):
NODES
/
d435i_accel_correction (stretch_core/d435i_accel_correction)
/camera/
realsense2_camera (nodelet/nodelet)
realsense2_camera_manager (nodelet/nodelet)
auto-starting new master
process[master]: started with pid [2811]
ROS_MASTER_URI=http://localhost:11311
process[rosout-1]: started with pid [2822]
started core service [/rosout]
process[d435i_accel_correction-2]: started with pid [2825]
process[camera/realsense2_camera_manager-3]: started with pid [2826]
process[camera/realsense2_camera-4]: started with pid [2828]
[ INFO] [1596336057.842410500]: Initializing nodelet with 8 worker threads.
[ INFO] [1596336058.090500264]: RealSense ROS v2.2.14
[ INFO] [1596336058.090535294]: Running with LibRealSense v2.35.2
[ INFO] [1596336058.127779345]:
[INFO] [1596336058.198102]: /d435i_accel_correction started
[ INFO] [1596336058.325181807]: Device with serial number XXXXXXXXXXX was found.
[ INFO] [1596336058.325352380]: Device with physical ID XXXXXXXXXXX was found.
[ INFO] [1596336058.325414536]: Device with name Intel RealSense D435I was found.
[ INFO] [1596336058.327258809]: Device with port number XXXXXXXXXXX was found.
[ INFO] [1596336058.334272715]: getParameters...
[ INFO] [1596336058.405801403]: setupDevice...
[ INFO] [1596336058.405835785]: JSON file is not provided
[ INFO] [1596336058.405854848]: ROS Node Namespace: camera
[ INFO] [1596336058.405877655]: Device Name: Intel RealSense D435I
[ INFO] [1596336058.405898139]: Device Serial No: XXXXXXXXXXX
[ INFO] [1596336058.405908854]: Device physical port: XXXXXXXXXXX
[ INFO] [1596336058.405921077]: Device FW version: 05.12.05.00
[ INFO] [1596336058.405938446]: Device Product ID: XXXXXXXXXXX
[ INFO] [1596336058.405953304]: Enable PointCloud: On
[ INFO] [1596336058.405967638]: Align Depth: On
[ INFO] [1596336058.405990910]: Sync Mode: On
[ INFO] [1596336058.406050165]: Device Sensors:
[ INFO] [1596336058.429121507]: Stereo Module was found.
[ INFO] [1596336058.446499891]: RGB Camera was found.
[ INFO] [1596336058.446630837]: Motion Module was found.
[ INFO] [1596336058.446668907]: (Infrared, 0) sensor isnt supported by current device! -- Skipping...
[ INFO] [1596336058.446682653]: (Fisheye, 0) sensor isnt supported by current device! -- Skipping...
[ INFO] [1596336058.446694703]: (Fisheye, 1) sensor isnt supported by current device! -- Skipping...
[ INFO] [1596336058.446711997]: (Fisheye, 2) sensor isnt supported by current device! -- Skipping...
[ INFO] [1596336058.446733162]: (Pose, 0) sensor isnt supported by current device! -- Skipping...
[ INFO] [1596336058.446769719]: Add Filter: pointcloud
[ INFO] [1596336058.447385373]: num_filters: 1
[ INFO] [1596336058.447405525]: Setting Dynamic reconfig parameters.
01/08 19:40:58,587 WARNING [140250009564928] (messenger-libusb.cpp:42) control_transfer returned error, index: 300, error: No data available, number: 3d
01/08 19:40:58,599 WARNING [140250009564928] (messenger-libusb.cpp:42) control_transfer returned error, index: 300, error: No data available, number: 3d
[Repeats ~100 times]
01/08 19:41:03,599 WARNING [140250009564928] (messenger-libusb.cpp:42) control_transfer returned error, index: 300, error: No data available, number: 3d
01/08 19:41:03,650 WARNING [140250111633152] (types.cpp:49) get_xu(id=11) failed! Last Error: Resource temporarily unavailable
terminate called after throwing an instance of 'rs2::invalid_value_error'
what(): get_xu(id=11) failed! Last Error: Resource temporarily unavailable
[camera/realsense2_camera_manager-3] process has died [pid 2826, exit code -6, cmd /opt/ros/melodic/lib/nodelet/nodelet manager __name:=realsense2_camera_manager __log:=XXXXXXXXXXX/camera-realsense2_camera_manager-3.log].
log file: XXXXXXXXXXX/camera-realsense2_camera_manager-3*.log
[camera/realsense2_camera-4] process has finished cleanly
log file: XXXXXXXXXXX/camera-realsense2_camera-4*.log
^C[d435i_accel_correction-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
If you’re experiencing this, we resolved it with the classic “turn it on and off again”. Simply rebooting the Ubuntu machine doesn’t power-cycle the RealSense Camera, so when rebooting the robot, first shutdown the Ubuntu machine, and then use the power switch in the trunk of the robot to turn off the power. Note that the Lift will drop when the power is cut, so using the included clamp to keep the arm up is recommended.
We also updated his packages with sudo apt update and sudo apt upgrade.