Hello Everyone,
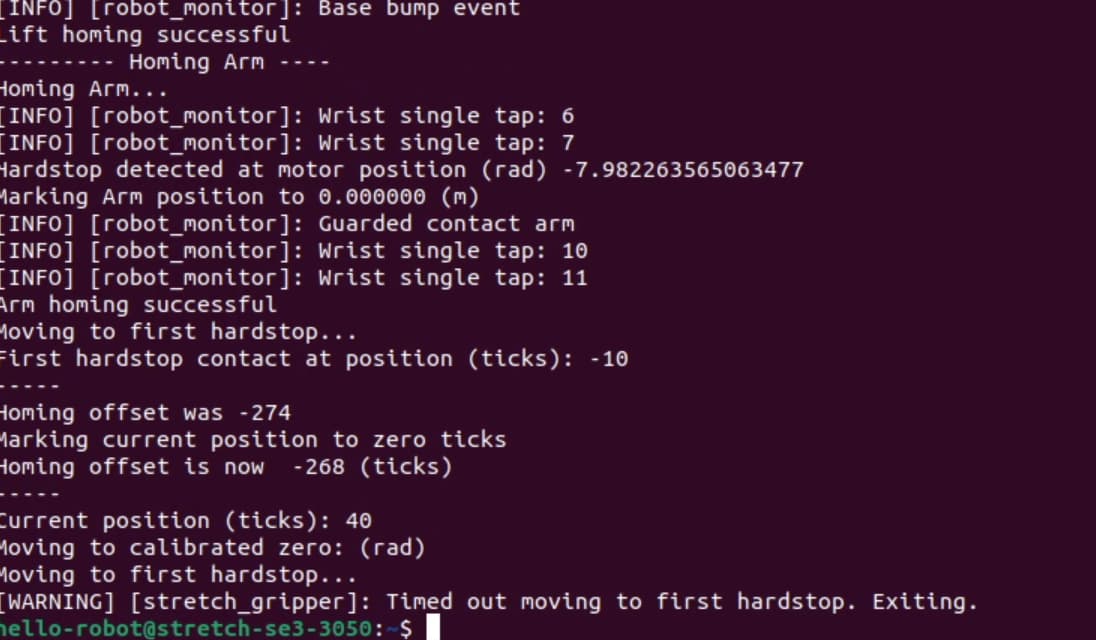
I’m running into a problem with my Stretch 3 robot’s gripper: when I issue the homing command, I can hear the gripper motors spin, but the fingers never close or move. The gripper fails to register a home position, and I suspect there’s an internal hardware fault (e.g., a broken gear or sensor) . I am going for the mail to the support , but before that I’d like to know if I can keep the rest of the robot operational if possible.
Below are the details and diagnostics I’ve collected so far.
1. System Details
- Robot Model: Stretch-SE3-3050
- Controller Version: ROS Humble on Ubuntu 22.04
Observed Behavior
- Motors spin (I can hear the whirring).
- No finger movement: jaws remain open at full span.
- After timeout (~10 s), homing fails with error:
- Temporary Bypass/Disable:
- Is there a way to completely disable or bypass the gripper homing step so I can continue using other robot functions (arm movement, base navigation) without errors?
- Further things which I should test before sending the mail for replacement .